Abstract
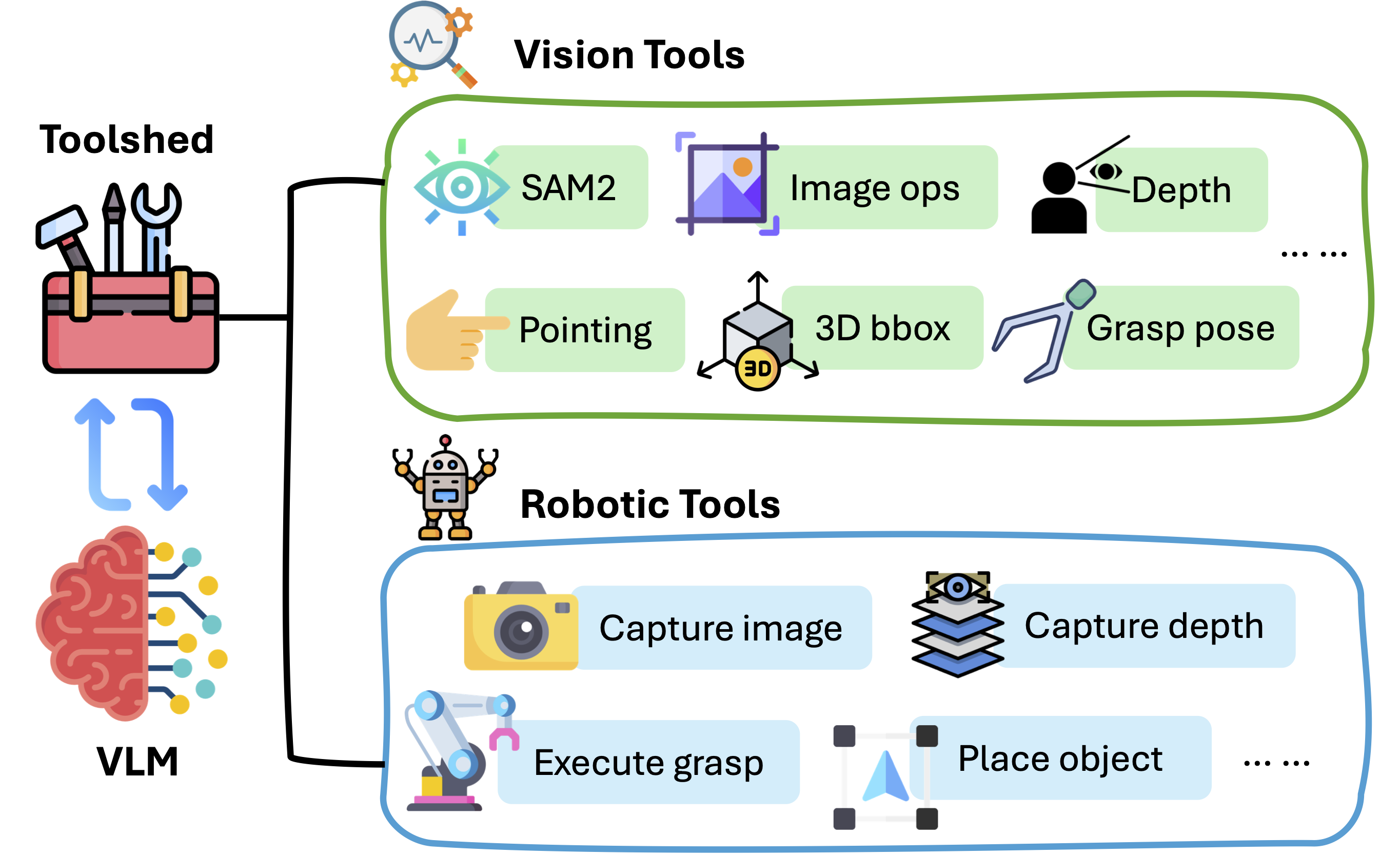
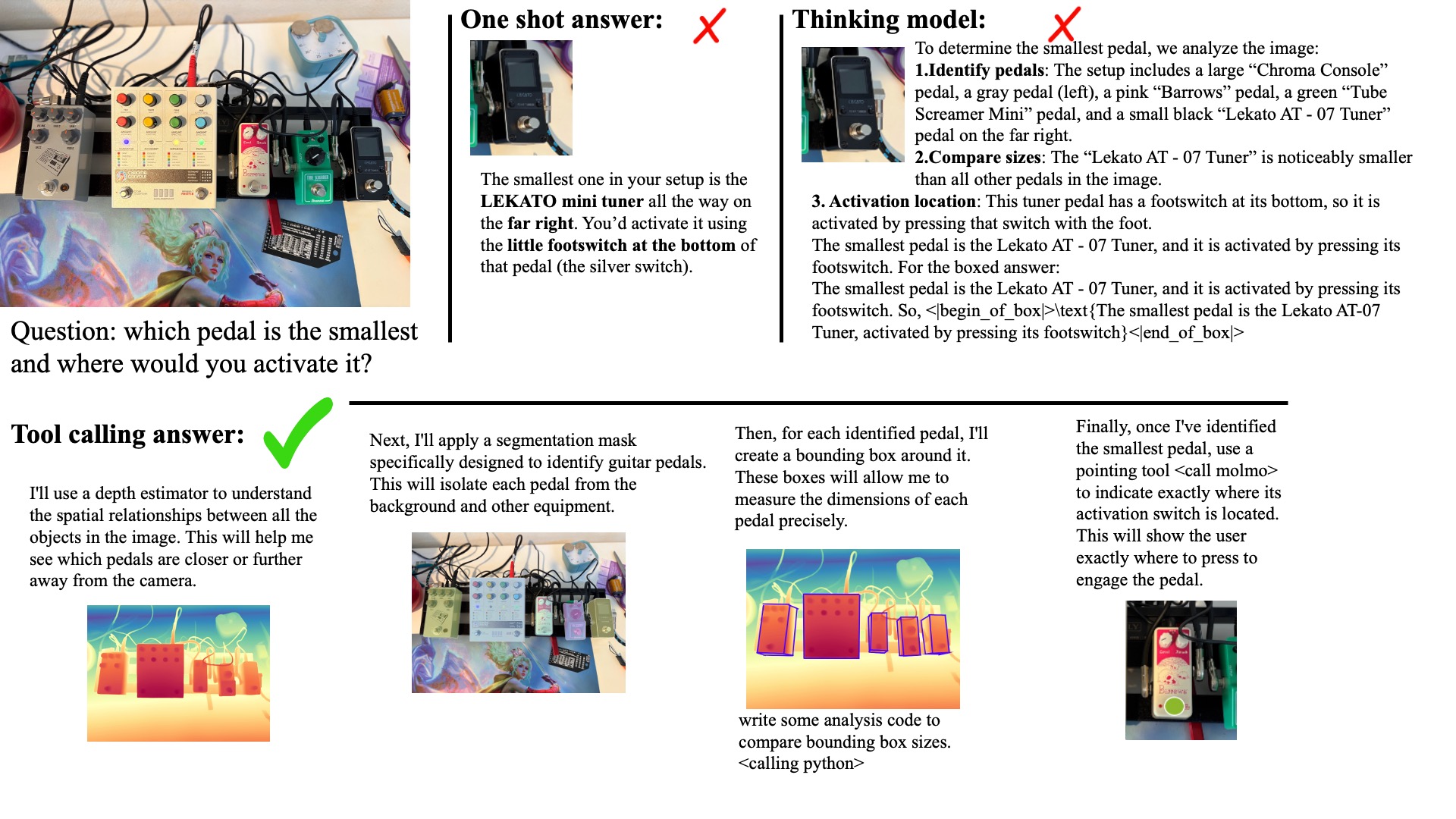
Vision Language Models (VLMs) demonstrate strong qualitative visual understanding, but struggle with metrically precise spatial reasoning required for embodied applications. The agentic paradigm promises that VLMs can use a wide variety of tools that could augment these capabilities, such as depth estimators, segmentation models, and pose estimators. Yet it remains an open challenge how to realize this vision without solely relying on handcrafted prompting strategies or enforcing fixed, predefined tool pipelines that limit VLMs' ability to discover optimal tool-use patterns. Reinforcement Learning could overcome this gap, but has so far been limited to reasoning with a single visual tool due to the large search space in multi-tool reasoning.
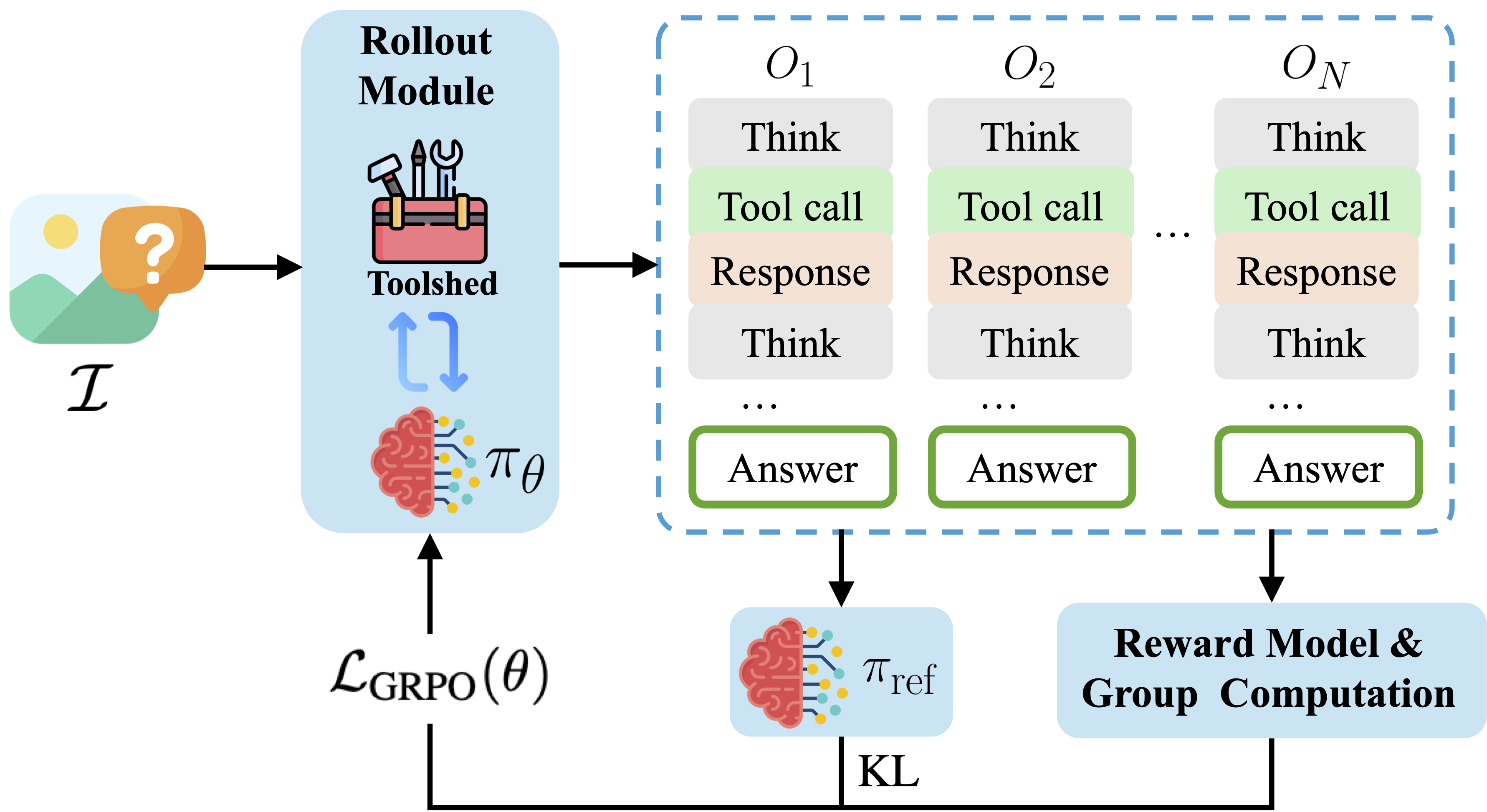
We introduce Double Interactive Reinforcement Learning (DIRL), a two-phase training framework where VLMs learn to coordinate multiple tools through interactive exploration and feedback. In the teaching phase, we combine demonstrations from a single tool specialist trained via interactive RL with traces from a frontier model using all tools. In the exploration phase, the model further refines multi-tool coordination through continued RL. Our model, SpaceTools, with tool-augmented spatial reasoning ability, achieves state-of-the-art performance on spatial understanding benchmarks (RoboSpatial-Home, BLINK, BOP-ask) and demonstrates reliable real-world manipulation using a 7-DOF robot as a tool. DIRL provides substantial improvements over the vanilla SFT (+12% on RoboSpatial) and RL (+16% on RoboSpatial) baselines.
SpaceTools learns to use multiple computer vision tools to solve complex problems.